















ACCEXP液化气储罐拆洗机械人

名号:机子人
产品品牌:
规格:
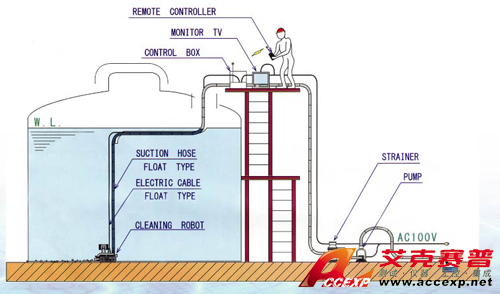
简介:ACCEXP油罐清洗机器人能在通常不可能进行安全操作的垂直壁面上自在地升降行走 机器人的行走速度能自在地改变,行进到任意场所进行操作 采用远距离遥控操作,能自在地行走到高空场所和危险场所 ACCEXP油罐清洗机器人能在凹凸不平壁...



申请服务
- 产品介绍
ACCEXP油罐清洗机器人能在通常不可能进行安全操作的垂直壁面上自在地升降行走
ACCEXP机器人的行走速度能自在地改变,行进到任意场所进行操作
采用远距离遥控操作,能自在地行走到高空场所和危险场所
ACCEXP油罐清洗机器人能在凹凸不平壁面上和曲面壁上吸着行走。
由于结构简单、小型紧凑,便于搬运移动。
|
项目 |
说明 |
| 尺寸图 | 450mm ( 宽 ) ′ 710mm ( 长 ) ′ 320mm ( 高 ) |
| 本身就重 | 主机设备: 15kg 机械泵泵: 5.4kg |
|
吸附对象壁面
|
玻璃板、混泥土土、灰泥、地面砖和五金边界层等 |
|
壁面上行走速度
|
0 ~ 15m /min( 米 / 分 ) |
| 可保持垂直带动的净重 | 最少为 30kg (当人身安全弹性系数取为两倍时) |
|
从壁面剥离所需力
|
约有为 45kg |
|
电压要求
|
200V |
|
电力要求
|
0.3KVA |
| 别的 | 跨越障碍物的机构和清扫机构在开发中。 |













